SwolKat a robot Quadruped
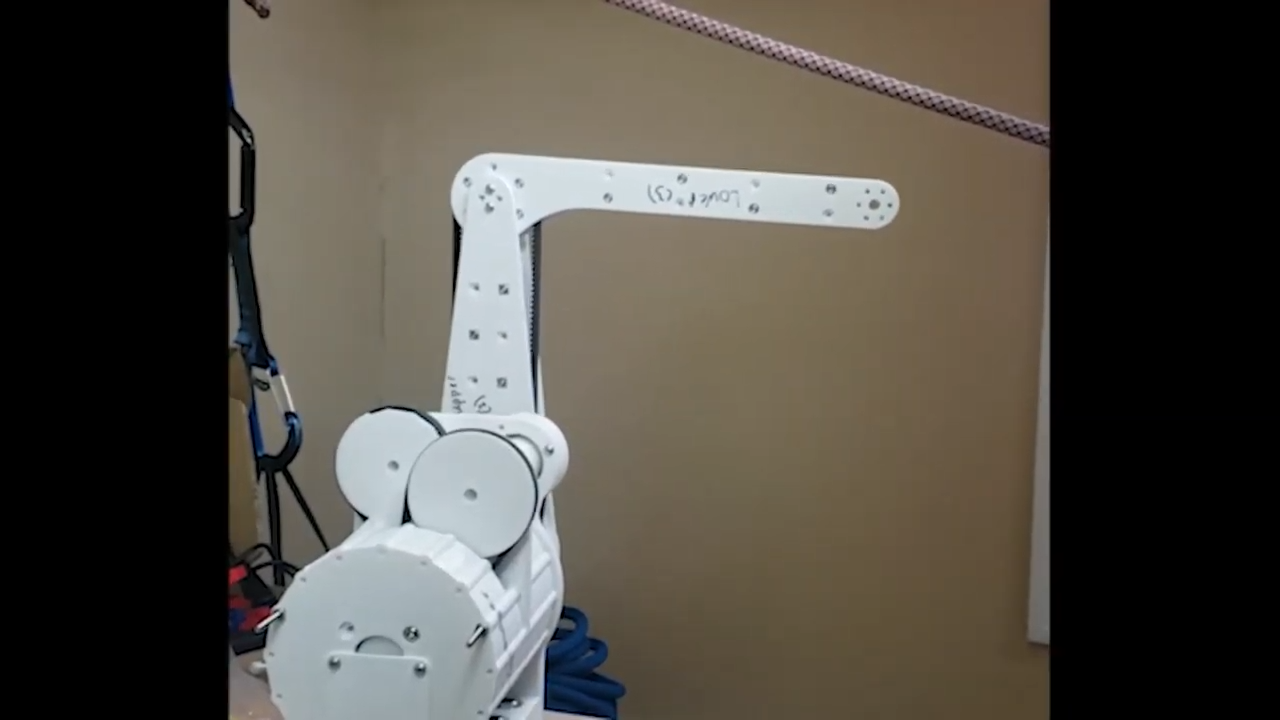
Led the mechanical design for a quadruped robotics platform aimed at advancing legged locomotion research. This ambitious project involved designing a fully 3D-printed robot with low-cost actuators and a unique capstan-based drive system for the shoulder joint, achieving high torque transmission in a compact design. While initial belt mechanisms proved unsuitable for high-torque applications, this challenge provided invaluable experience in actuator selection, torque requirements, and the iterative design process.